TB371 4 Key MCU Keyboard Button Board Compatible UNO MEGA2560 Pro Mini Nano Due Raspberry Pi Teensy+
New
20 were available
R335.00
0% off
Shipping
R35.00 Standard shipping using one of our trusted couriers applies to most areas in South Africa. Some areas may attract a R30.00 surcharge. This will be calculated at checkout if applicable. Check my rate
The seller has indicated that they will usually have this item
ready to ship within 12 business days.
Shipping time depends on your delivery address.
The most accurate delivery time will be calculated at checkout,
but in general, the following shipping times apply:
Replacement Guarantee:
7 Days: We stand by this guarantee
Get it now, pay later
Product details
Condition
New
Location
International
Bob Shop ID
643389867
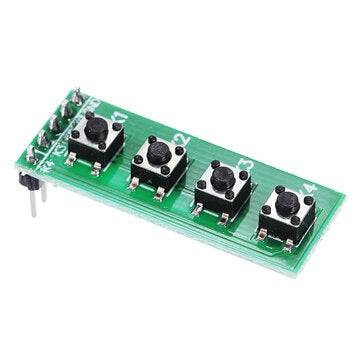
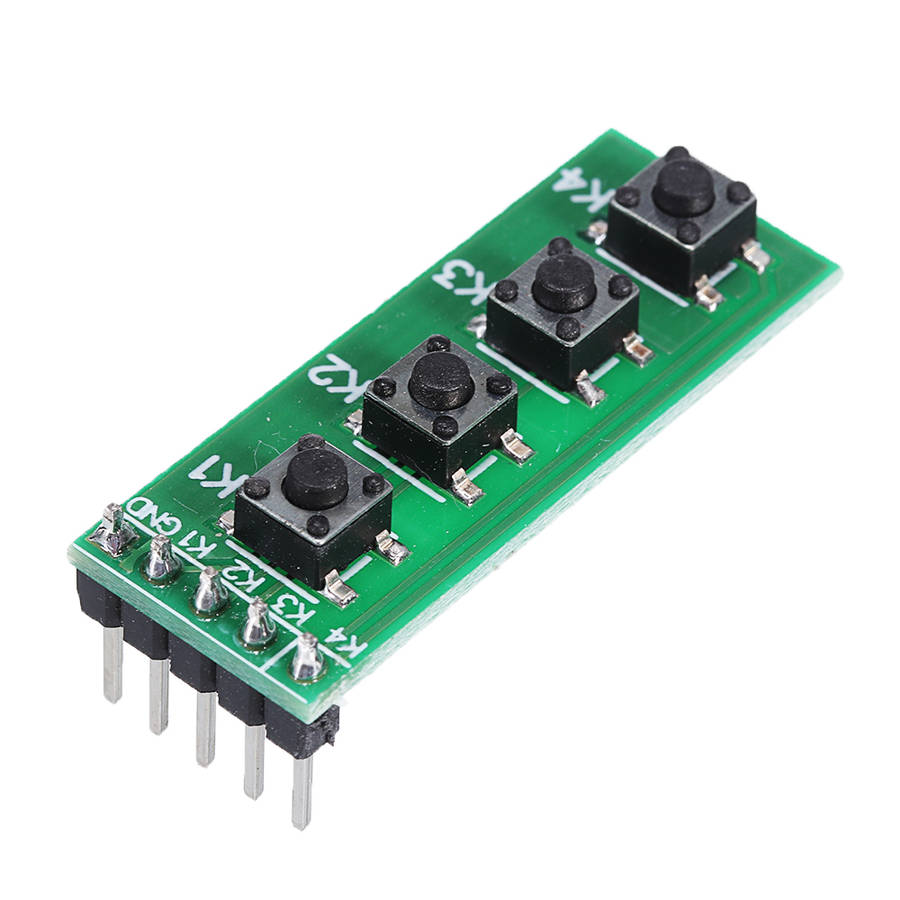
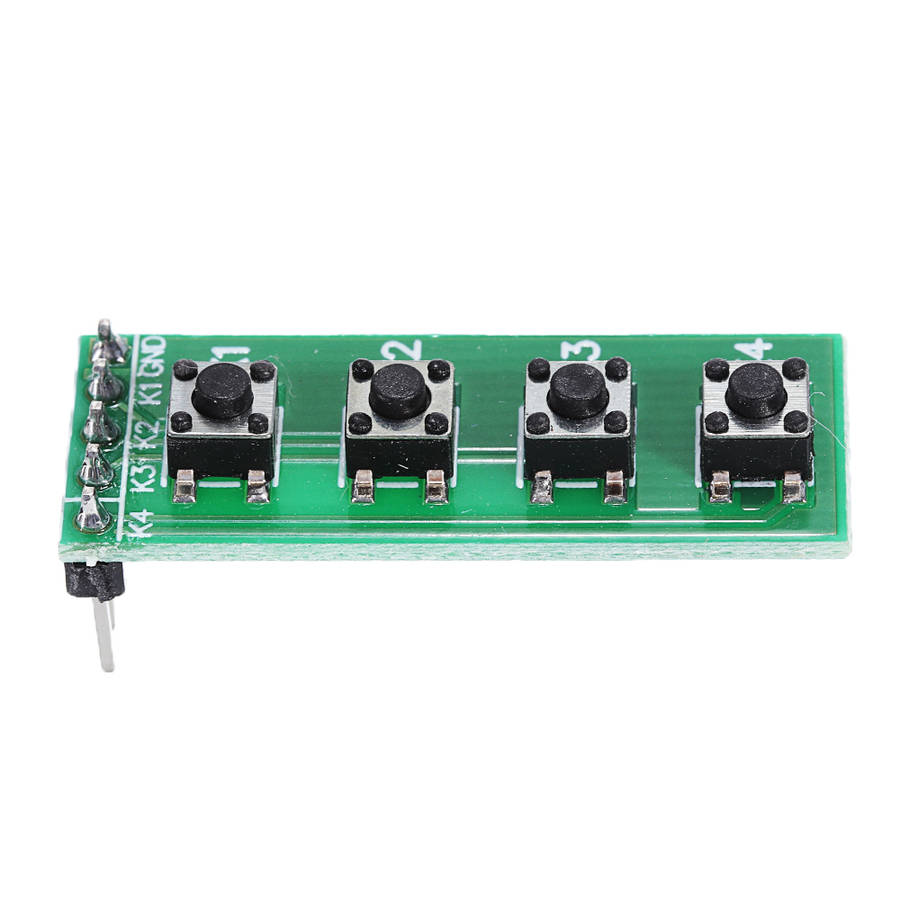
Description: 1. 4-button Common Cathode key module(When pressed output low level). 2. GND K1 K2 K3 K4 4 PIN OUT 2.54mm 3. Working voltage: DC 0-48V 4. Size: 12.7 x 33mm 5. It can be inserted directly into Arduiuo uno mega2560 due,Ideal for linking up to your Arduiuo UNO Mini Nano Mega2560 Breadboard raspberry pi banana pi etc,or others MCU PLD CPU ( AVR STM32 ARM PIC C51 NRF24LE1 CC2530 MSP430 STM8 FPGA CPLD etc.)
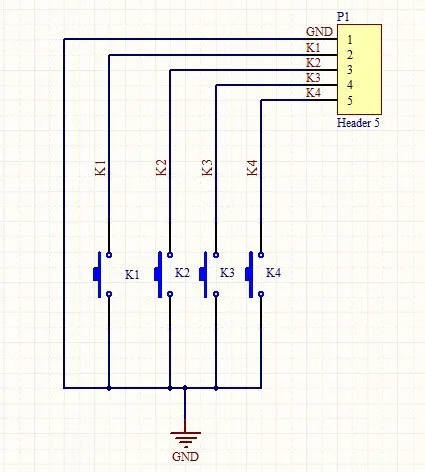
Circuit schematics:
Arduiuo uno/mega2560 Code //******************************************************// /* Arduiuo_4key_uart This example code is in the public domain. */ // Define key pin int K1 = 13; int K2 = 12; int K3 = 11; int K4 = 10; // variables will change: int buttonState = 0; // variable for reading the pushbutton status // the setup routine runs once when you press reset: void setup() { // initialize the keys pin as an input. pinMode(K1, INPUT); pinMode(K2, INPUT); pinMode(K3, INPUT); pinMode(K4, INPUT); //Activate key pin internal pull-up resistors digitalWrite(K1, HIGH); digitalWrite(K2, HIGH); digitalWrite(K3, HIGH); digitalWrite(K4, HIGH); // initialize serial communications at 9600 bps: Serial.begin(9600); } // the loop routine runs over and over again forever: void loop() { buttonState = digitalRead(K1); if(!buttonState)Serial.print(k1 n ); do { buttonState = digitalRead(K1); } while(!buttonState);//Wait button release buttonState = digitalRead(K2); if(!buttonState)Serial.print(k2 n ); do { buttonState = digitalRead(K2); } while(!buttonState);//Wait button release buttonState = digitalRead(K3); if(!buttonState)Serial.print(k3 n ); do { buttonState = digitalRead(K3); } while(!buttonState);//Wait button release buttonState = digitalRead(K4); if(!buttonState)Serial.print(k4 n ); do { buttonState = digitalRead(K4); } while(!buttonState);//Wait button release delay(100); } //******************************************************//